Závislost fázové bezpečnosti a překmitu na volbě asymptotické náhrady frekvenční charakteristiky
Při návrhu regulátoru pomocí frekvenčních charakteristik se vychází z požadované fázové bezpečnosti nebo překmitu. Tyto veličiny jsou spolu svázány. Čím menší je fázová bezpečnost, tím je odezva kmitavější. Fázová bezpečnost však také závisí na tom, jak dlouhý je úsek apmlitudové charakteristiky se sklonem -20dB na dekádu kolem hodnoty omega řezu a jaký sklon mají úseky (zprava i zleva), které na tento úsek navazují a v jaké vzdálenosti jsou tyto zlomy od omega řezu. Sklon -20dB na dekádu je nutný nejen kvůli fázové bezpečnosti ale také kvůli stabilitě systému (viz. Nyquistovo kriterium stability). V případě, že jsou zlomy vlevo i vpravo od omega řezu umístěny symetricky a mají stejný sklon, potom při volbě omega řezu uprostřed úseku se sklonem -20dB je v místě omega řezu též největší fázová bezpečnost. Pokud tomu tak není, stačí počítat v dále popsané metodě s bližším zlomem (či zlomem s větším sklonem) a výsledek bude lepší než hodnota předpokládaná.
Při návrhu regulátoru pomocí frekvenčních charakteristik je nutno zvolit hodnotu vzdálenosti zlomů ( L ) asymptotické náhrady od hodnoty 0dB. Někdy se můžeme setkat s hodnotou D, délky úseku se sklonem 20dB mezi zlomy asymptotické charakteristiky. Tato metoda je ekvivalentní, protože existuje jednoznačný přepočet L a D díky známému sklonu charakteristiky 20dB/dekádu.
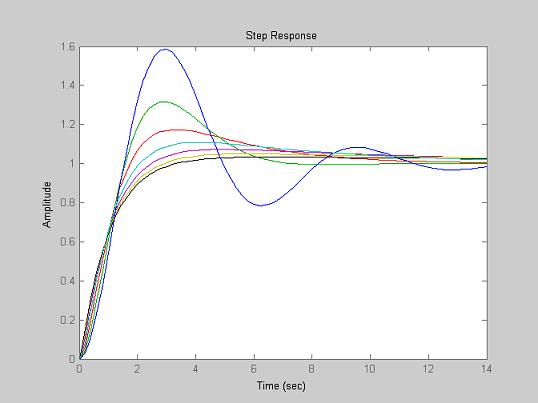
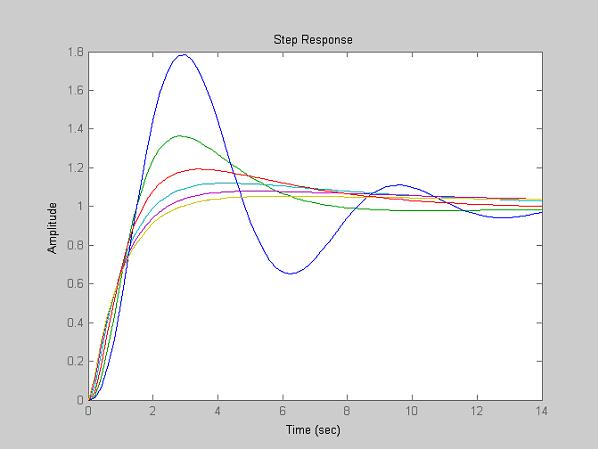
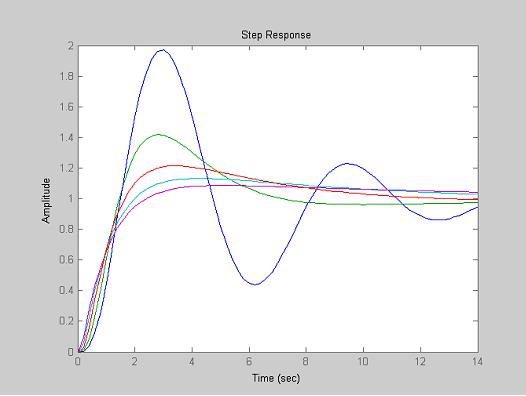
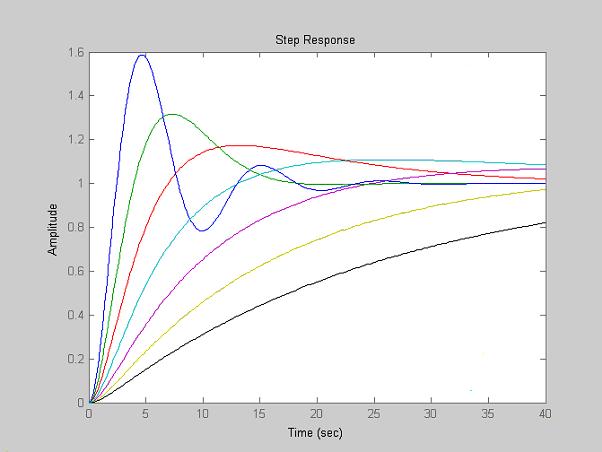
Předpokládejme situaci, že frekvenční charakteristika protíná 0dB pod sklonem -20dB a tento úsek je ukončen zlomy na hodnotu -40 dB (popř. -60dB, či -80dB) na obou stranách. Vzdálenost zlomu od osy 0dB označíme L (je svázána přes sklon -20dB s délkou tohoto úseku). Pokud rozšiřujeme úsek se sklonem -20dB, tj. Zvětšujeme hodnotu L, potom ze zvětšuje fázová bezpečnost. Vytvoříme-li pro tyto systémy přenos řízení, potom pro odezvy na jednotkový skok vidíme pro zvětšující se hodnotu L zmenšující se překmit. Sledované hodnoty vyneseme do grafů, které používáme pro zjištění hodnoty L návrhu regulátoru pokud vycházíme z požadovaného překmitu či fázové bezpečnosti. (Pokud je na některé straně sklon menší než předpokládaný, potom bude výsledek lepší než předpokládaný).
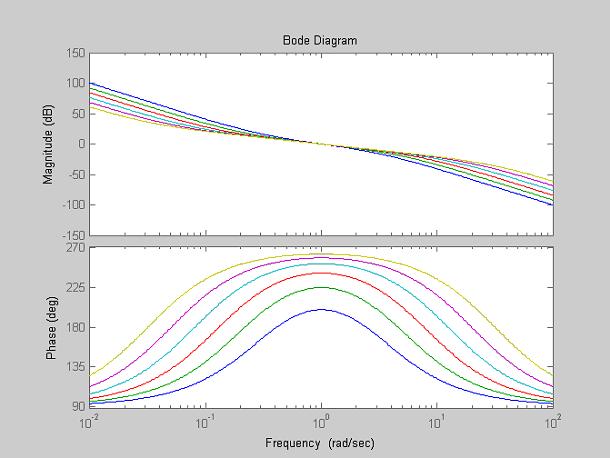
V následujících grafech je zobrazena situace, kdy v okolí úseku -20dB jsou sklony -40 resp. -60 resp. -80dB
Přechodové charakteristiky pro rozsah zvolených hodnot L (viz. Další grafy)
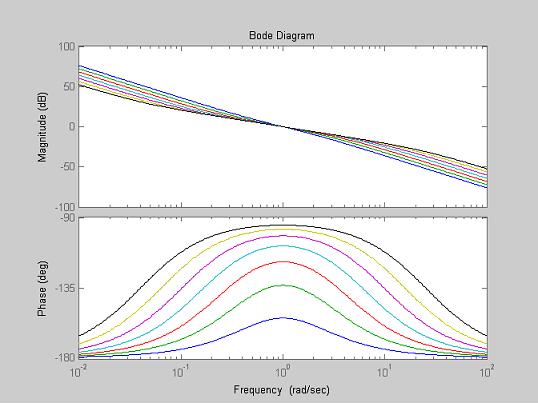
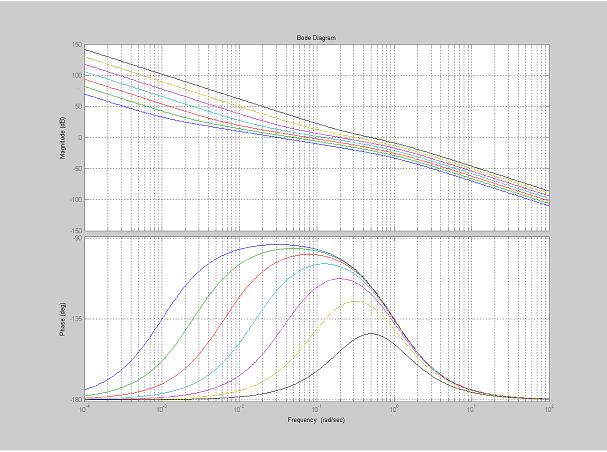
amplitudové charakteristiky pro různé hodntoty L a příslušné frekvenční charakteristiky, ze kterých je možné odečíst fázovou bezpečnost (hodnoty na y ose nejsou v měřítku, u fáze je ještě nutno upravit o 180 stupňů).
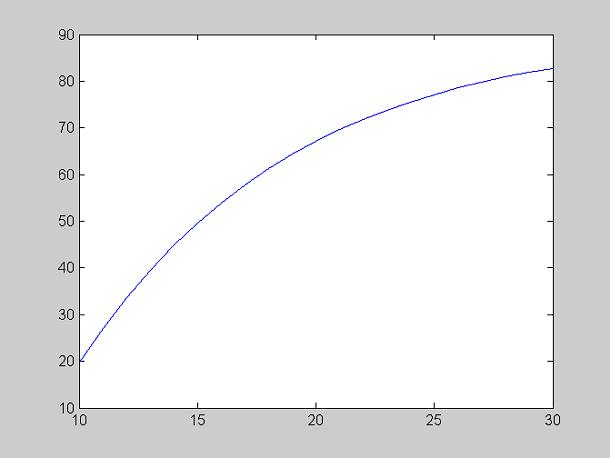
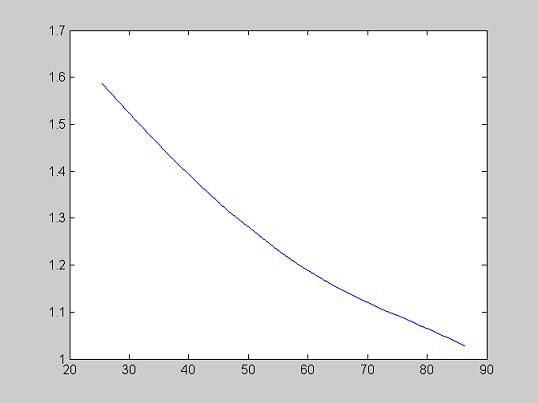
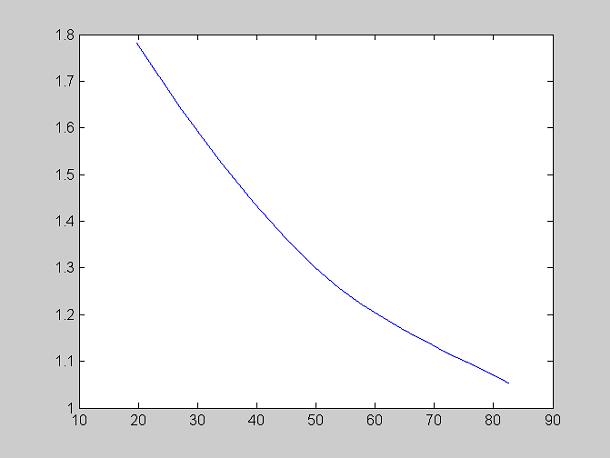
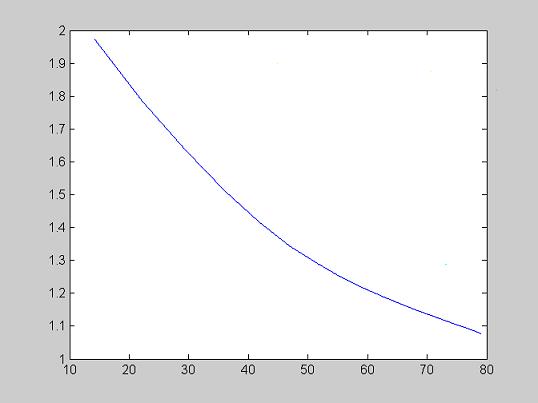
závislost fázové bezpečnosti na zvolené hodnotě L

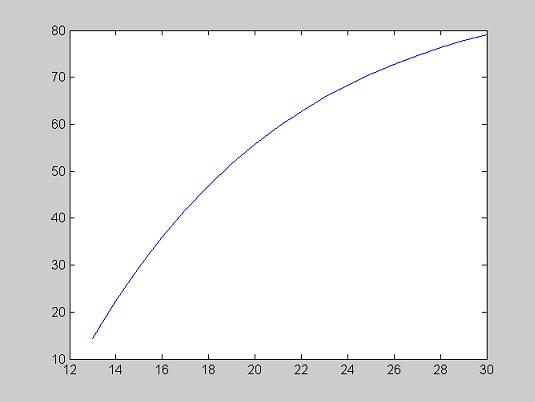
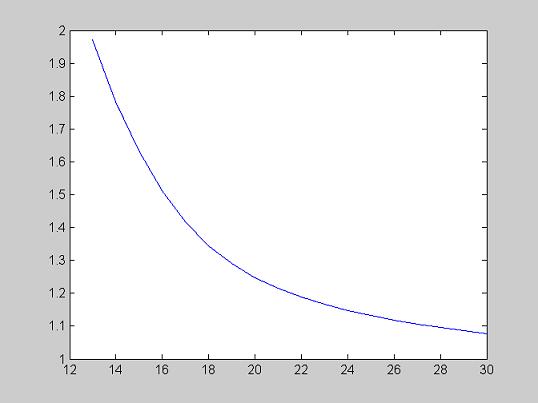
závislost překmitu na fázové bezpečnosti
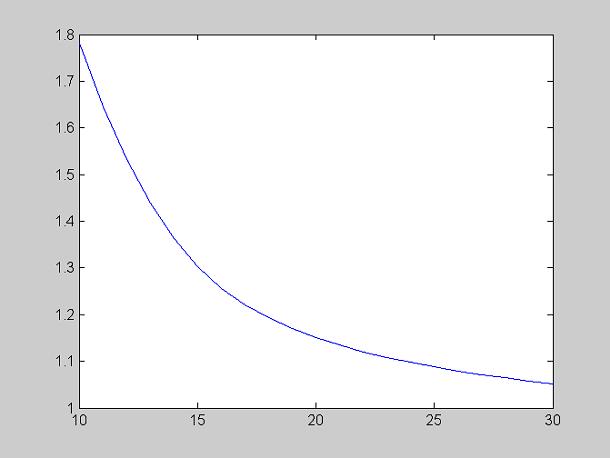
Závislost překmitu na hodnotě L (Pozn.: hodnoty osy Y jsou “přizpůsobeny” do měřítka, hodnoty na ose X mají stejnou hodnotu maximální ale různé hodnoty minimální – stejně tak v předešlých případech)

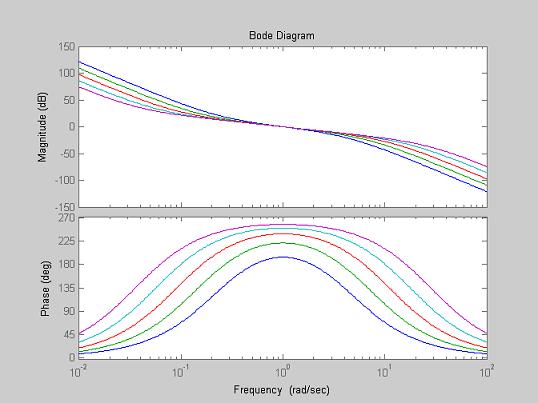
Pozn.:
Při rozboru, který je prezentován výše jsme pro všechny charakteristiky volili stejné omega řezu, abychom mohli zhodnotit vliv fázové bezpečnosti a překmitu ve spojitosti s hodnotou L. U skutečného návrvhu však vycházíme z parametrů soustavy – jejích kořenů (resp. jednoho z kořenů, který se liší podle typu soustavy a počtu nul (a členu 1/p), které máme k dispozici). V následujících grafech jsou zobrazeny frekvenční charakteristiky, které respektují konstantní polohu posledního pólu a tudíž pro změnu L se mění i omega řezu. Vliv na rychlost přechodové charakteristiky je vidět na druhém grafu.
Poslední změna 2006-04-04